






Medium Type SCARA


500~600mm
Reach

5k to 20k
Payload

Harmonic
Gear

Inertia
Moment Capacity


Features
01 Internal structure achieving the high-rigidity and high-accuracy.
02 Completely beltless structure
A totally beltless structure was achieved by using a ZR axis direct coupling structure. This direct drive structure drastically reduces wasted motion. It also maintains high accuracy over a long period of time. It ensure maintenance-free usage for extended periods with no worries about belt breakage, stretching or deterioration with age (feature applies to all XG series models and the YK180X/YK220X).
03 High speed
The standard cycle time is fast of course but the YAMAHA design also stresses tact time in the actual usage region. A drastic improvement in maximum speed was made by changing the gear ratio and maximum motor rpm. This also resulted in a better tact time during long distance movement.
04 Improved maintenance features
The covers on the YAMAHA SCARA robot YK-XG series can be removed from the front
or upwards. The cover is separate from the cable so maintenance tasks are easy.
On ordinary robots replacing the grease on the harmonic gear takes a great deal of time and trouble
because the gear must be disassembled and position deviations might occur. On YAMAHA SCARA robots
however the harmonic gear is the grease-sealed type so no grease replacement is needed (YK-500XG to
YK1000XG).
05 Robot R axis inertia moment capacity
SCARA robot performance is not limited to just standard cycle time. Actual work situations include a diverse range of heavy work pieces as well as work with large offsets. Using a low R axis inertia moment in those cases will help drastically cut the cycle time. All YAMAHA SCARA robots have a speed reducer directly coupled to the tip of the rotating axis. The R axis produces an extremely high allowable inertia moment which delivers high speed operation compared to structures where positioning is usually done by a belt after decelerating.
R axis allowable inertia moment : Comparing YK120XG with competitor's models
A large inertia is generated when the offset from the R axis to the load center is large and this can severely restrict the acceleration during operation. The allowable inertia moment on the YAMAHA XG series is exceedingly large compared to other company SCARA robots in the same class and so can operate at high speed even with a work offset.
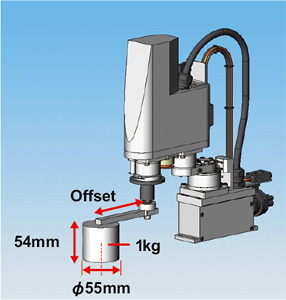
Figures when using 1kg load (see view at upper right)
06 Compact
Changing the cable layout made the overall cable height lower than the unit cover. Also, utilizing a motor with a small overall length and extrusion material base yielded the smallest dimensions among equipment in the same class.
07 Environmentally rugged resolver provides closed loop control
The position detector is a resolver. The resolver has a simple yet strong
structure using not electronic components or elements and so has great features such as being
extremely tough in harsh environments as well as a low breakdown rate. The resolver structure has
none of the detection problems that occur in other detectors such as optical encoders whose
electronic components breakdown or suffer from moisture or oil that sticks to the disk. Moreover,
mechanical specifications for both absolute and incremental specifications are common to all
controllers so one can switch to either absolute or incremental specifications just by setting a
parameter.
Also even if the absolute battery is completely worn down, the SCARA can operate on incremental
specifications so in the unlikely event of trouble one can feel secure knowing that there will be no
need to stop the production line. The backup circuit has been completely renovated and now has a
backup period extending to 1 year.
Note. The resolver has a simple structure not using electronic components at all. It is highly
resistant to low and high temperatures, impacts, electrical noise, dust particles, oil, etc. and is
used in automobiles, trains, and airplanes.
08 Zone control (=Automatically sets the maximum acceleration/deceleration) function
On SCARA robots there is a large difference in the load applied to the motor and the speed reducer depending on whether the robot arm is folded or extended. YAMAHA SCARA robots however can automatically set an optimal maximum acceleration and deceleration using the arm status when starting operation and the arm status when ending operation. This capability means that just entering the initial payload will prevent the robot from exceeding tolerance values for motor peak torque and speed reducer allowable peak torque. So full power can be extracted from the motor whenever needed and a high level of acceleration/deceleration maintained.
Note. A motor torque that exceeds the peak value will cause bad effects on robot controllability and cause mechanical vibration. Also, exceeding the speed reducer allowable peak torque value will cause early stage robot breakdowns and lead to a drastic drop in the robot service life span.
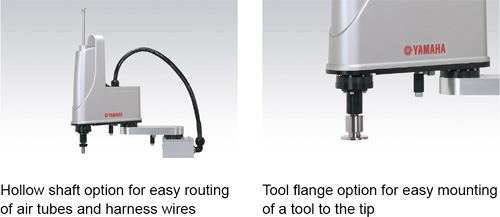
09 Hollow shaft and tool flange options are selectable
Useful options include a hollow shaft for easy wiring to the tip tool and a
tool flange for tool clamping.
* YK250XG/YK350XG/YK400XG/YK500XGL/YK600XGL
10 History of 30 years
The first YAMAHA robots were SCARA robots. Since the first SCARA robot called "CAME" was produced in 1979, some 30 years of SCARA robot innovations have continually appeared. These SCARA robots have undergone countless modifications in an everchanging marketplace and amassed a hefty record of successful products making them an essential part of the YAMAHA robot lineup.

Specifications
Clicking a desired model name allows you to see its detailed catalog.
| Model | Arm length(mm) | Maximum payload(kg) | Standard cycle time(sec) |
|---|---|---|---|
| 500 | 5.0(4.0)Note1 | 0.59 | |
| 500 | 10.0(9.0)Note2 | 0.45 | |
| 600 | 5.0(9.0)Note2 | 0.63 | |
| 600 | 10.0(4.0)Note1 | 0.46 | |
| 600 | 20.0(19.0)Note3 | 0.47 |